Motion planning: OpenRAVE
OpenRAVE is one of the most powerful existing simulation and motion planning environments. It is widely used in academia and industry.
OpenRAVE installation
Follow the instructions at https://github.com/crigroup/openrave-installation to install OpenRAVE.
Testing the installation
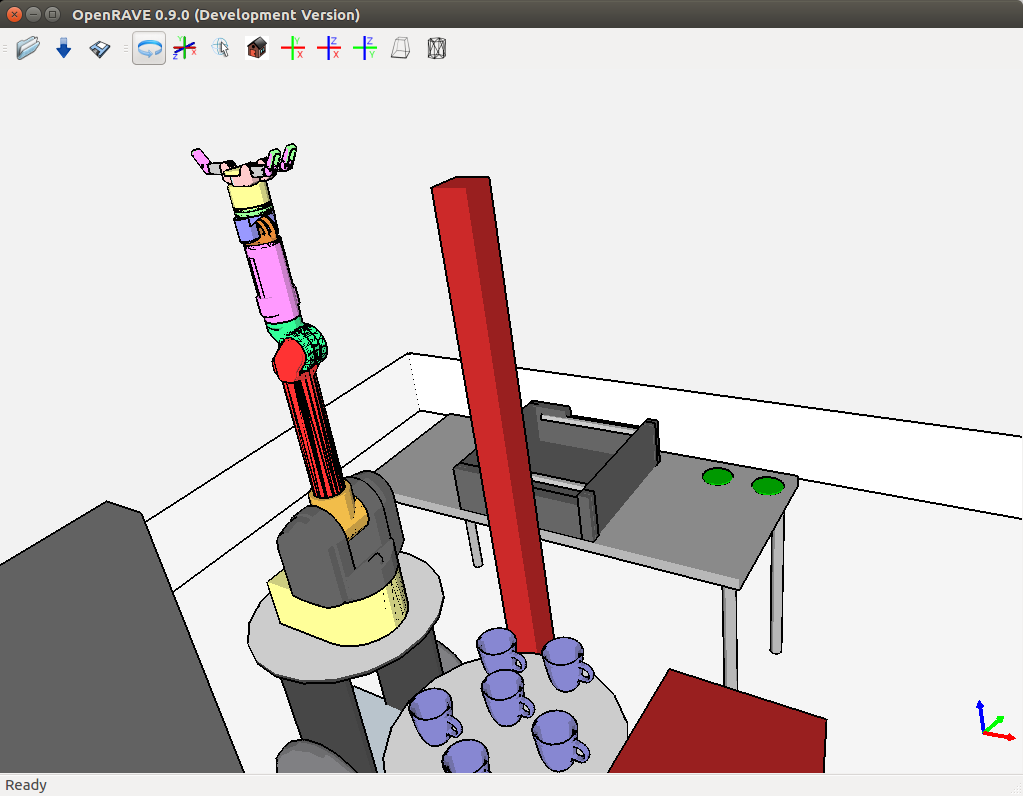
Let's try OpenRAVE on a built-in environment:
command-line
openrave data/lab1.env.xml
Now you should be able to try some of the OpenRAVE examples.