Motion planning assignment
Prerequisites: Chapters 1, 2, 3.
Exercise: Pick and place
First, load the environment, the viewer and the robot (make sure that you have installed OpenRAVE, cloned the course repository, and changed directory to .
python
import numpy as np
import openravepy as orpy
env = orpy.Environment()
env.SetViewer('qtcoin')
env.Load('osr_openrave/worlds/pick_and_place.env.xml')
def create_box(T, color = [0, 0.6, 0]):
box = orpy.RaveCreateKinBody(env, '')
box.SetName('box')
box.InitFromBoxes(np.array([[0,0,0,0.035,0.03,0.005]]), True)
g = box.GetLinks()[0].GetGeometries()[0]
g.SetAmbientColor(color)
g.SetDiffuseColor(color)
box.SetTransform(T)
env.Add(box,True)
return box
T = np.eye(4)
container_center = np.array([0.4, 0.2, 0.195])
# Destination
T[:3, 3] = container_center + np.array([0, -0.5, 0])
destination0 = create_box(T, color = [0, 0, 0.6])
T[:3, 3] = container_center + np.array([0, -0.6, 0])
destination1 = create_box(T, color = [0, 0, 0.6])
# Generate random box positions
boxes = []
nbox_per_layer = 2
n_layer = 20
h = container_center[2]
for i in range(n_layer):
nbox_current_layer = 0
while nbox_current_layer < nbox_per_layer:
theta = np.random.rand()*np.pi
T[0, 0] = np.cos(theta)
T[0, 1] = -np.sin(theta)
T[1, 0] = np.sin(theta)
T[1, 1] = np.cos(theta)
T[0, 3] = container_center[0] + (np.random.rand()-0.5)*0.2
T[1, 3] = container_center[1] + (np.random.rand()-0.5)*0.1
T[2, 3] = h
box = create_box(T)
if env.CheckCollision(box):
env.Remove(box)
else:
boxes.append(box)
nbox_current_layer += 1
h += 0.011
Note that we have generated 40 green boxes, on 20 layers, at random positions and orientations within the container, as shown below:
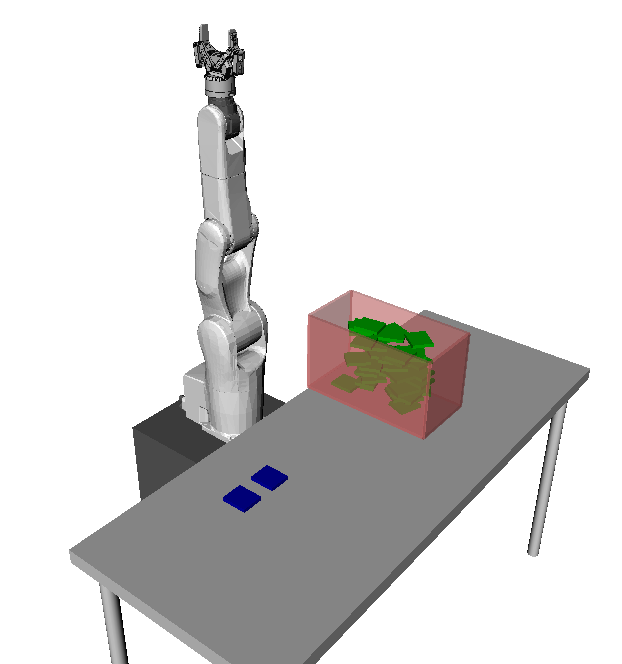
Question 1
Write the code to move all the green boxes from the container towards the blue destination bays. The sequence of motions is as follows:
- Move the robot to a correct grasping position, i.e. gripper perpendicular to the surface of the box, finger pads parallel to the edges of the box (you may grasp along either the short or the long edges of the box);
- Grab the box, using the OpenRAVE function , see Section Inverse kinematics. You are not required to close the gripper;
- Move the box towards one of the blue destination bays and release the grasp. Note that the green boxes must be piled up on top of the blue bays, with a vertical separation of 1mm between two layers. There is no restriction on the number of boxes each bay can support;
- Start again from step 1.
All motions must be collision-free and respect the robot's joint, velocity, and acceleration limits.
Question 2
Compute the angle between the normal to the large surface of the box and the vertical axis at every time instants. We call the absolute value of this angle the "tilting angle". For each box, plot the tilting angle as a function of time, for the whole duration of the transportation.
Question 3
A zero tilting angle corresponds to the situation where the box is horizontal, which is desired in applications such as liquid transportation. Write the code to move the green boxes as in Question 1, but with the supplementary constraint that the tilting angle is always smaller than 1 degrees.
If you manage to move all 40 boxes in less than 10 min, computation time and robot motion time all included, consider sending your code, together with a written explanation, to cuong.pham@normalesup.org. We shall test your code on our computer, and if it satisfies the requirements, we'll come back to you for a job interview.