osrobotics
0. Introduction
1. Installation and Setup
Basic tools
Motion planning: OpenRAVE
Vision: OpenCV, PCL
System: ROS, Gazebo
2. Manipulator kinematics
Forward kinematics
Inverse kinematics
3. Motion planning
Path planning
Time-parameterization
Post-processing
4. Robot vision
2D vision
3D vision
5. System
Robot simulation in Gazebo
6. Force control
Principles of force control
Examples
7. Assignments
Motion planning
Robot vision
Powered by
GitBook
1. Installation and Setup
Software installation and start-up guides
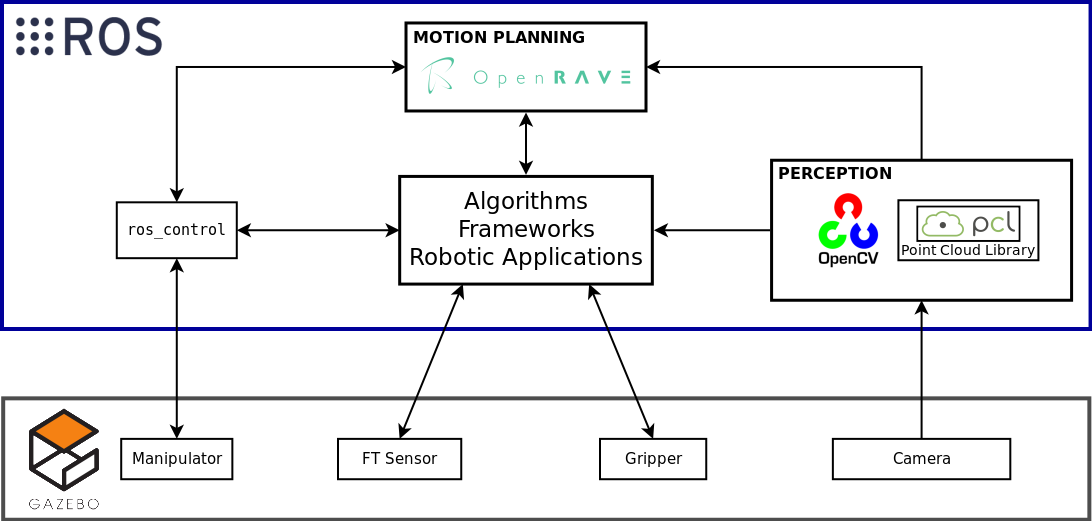
In this section, we present the tools that are required and guide you through their installations.
Figure 2. Some software used in this course.
results matching "
"
No results matching "
"