Principles of force control
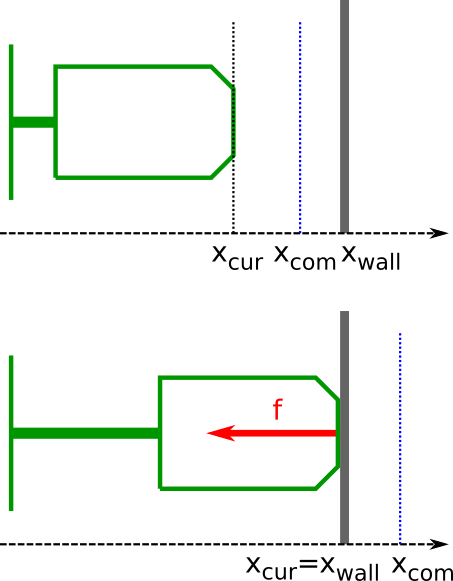
Consider a 1-DOF, linear, position-controlled robot as in the figure below. One would like to control the contact force between the robot end-effector and the wall so as to track a reference , where is, for example, a constant positive value.
For that, one can use a Proportional-Derivative (PD) control law as below. Note that the command sent to the robot is is a desired position.
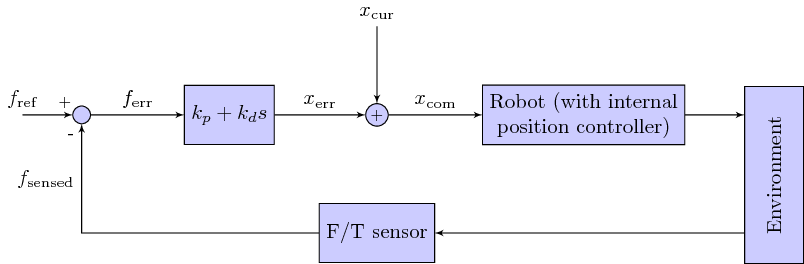
The Force/Torque (F/T) sensor measures the contact force between the end-effector and the wall. When there is no contact (first figure, top sketch), the contact force is zero, thus , yielding . Assuming stationary initial conditions, one has next , which implies that , which in turn makes the robot move to the right, towards the wall.
Upon contact between the robot end-effector and the wall (first figure, bottom sketch), the contact force sensed by the F/T sensor becomes positive, but initially smaller than – assuming "soft" collision. Therefore, initially, one still has , meaning that the robot is commanded to penetrate the wall.
Finally, interactions between the PD controller and the stiffness of the end-effector, of the wall, and of the robot's internal position controller (characterized in part by its own PID gains), will eventually lead to a stationary state where and (so as to ensure a positive contact force).