Examples: hybrid control and impedance control
Hybrid position-force control
In Section Principles of force control, we have studied force control in a 1-DOF robot. In multi-DOF systems, one usually needs to simultaneously control the force in some task directions and the position in others, a scheme known as hybrid position-force control. Consider for instance the task of sliding the robot end-effector on a tabletop, which can be found in assembly or grinding.
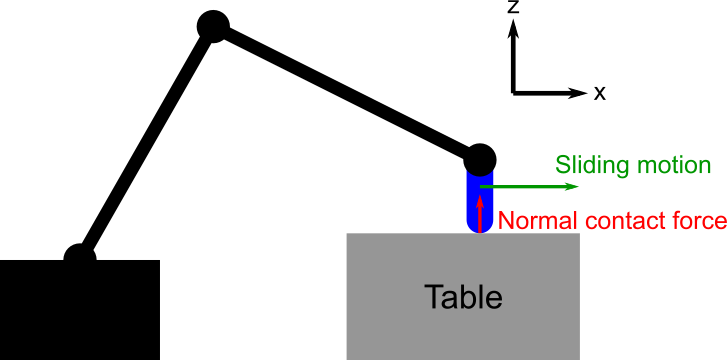
To achieve this task, one needs to control the normal contact force (along the z-axis) to be at some positive values (for example ), while controlling the position along the x-axis (sliding motion). This can be achieved by the following hybrid position-force controller.
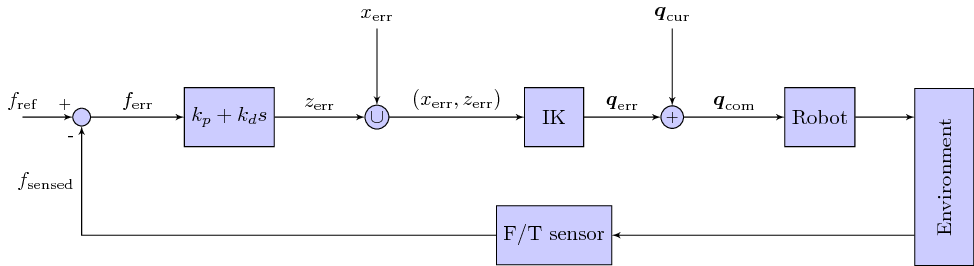
The leftmost part of the hybrid scheme is similar to a PD force controller (see Section Principles of force control, which transforms the force tracking error in the z-axis into a position tracking error in the z-axis. Next, is combined with the position tracking error in the x-axis to obtain a task-space position tracking error .
Note that can be easily derived from the desired motion in the x-axis . For instance, if the desired motion is to slide towards the right with a velocity , then , where is the controller time step (assuming a digital implementation).
Next, the task-space position tracking error is translated into a configuration-space error by differential Inverse Kinematics, which can be finally fed into the robot internal position controller.
Example: Hybrid control in Gazebo
We go through the same example as in Robot simulation in ROS/Gazebo in order to pick up the box and retreat from the table surface. Note however the following differences
- We use another ROS launch file, which in particular loads different controllers, see below;
- We use instead of so as to have real-time access to the joint position;
- We use to access force/torque measurements.
First, we start the Gazebo environment in Terminal 1 and run robot controllers launch file in Terminal 2
# Terminal 1
roslaunch osr_gazebo cubes_task.launch
# Terminal 2
roslaunch osr_control controllers_force_control_demo.launch
Next, run a similar code as in Robot simulation in ROS/Gazebo up to the retreating move
python
import rospy
import criros
import collections
import copy
import time
import numpy as np
import openravepy as orpy
import tf.transformations as tr
from osr_openrave import kinematics, planning
from geometry_msgs.msg import WrenchStamped
from osr_control.controllers import GripperController, JointPositionController, FTsensor
rospy.init_node('setting')
env = orpy.Environment()
if not env.Load('worlds/cubes_task.env.xml'):
rospy.logerr('Failed to load the world. Did you run: catkin_make install?')
exit(1)
env.SetDefaultViewer()
Tcamera = tr.euler_matrix(*np.deg2rad([-120, 13, 135]))
Tcamera[:3,3] = [1, 1, 2]
env.GetViewer().SetCamera(Tcamera)
robot = env.GetRobot('robot')
manipulator = robot.SetActiveManipulator('gripper')
robot.SetActiveDOFs(manipulator.GetArmIndices())
taskmanip = orpy.interfaces.TaskManipulation(robot)
js_rate = criros.utils.read_parameter('/joint_state_controller/publish_rate', 250.0) #read publish rate if it does exist, otherwise set publish rate
T = 1. / js_rate
rate = rospy.Rate(js_rate)
# Scale down the velocity and acceleration limits
robot.SetDOFVelocityLimits(robot.GetDOFVelocityLimits()*0.4)
robot.SetDOFAccelerationLimits(robot.GetDOFAccelerationLimits()*0.2)
iktype = orpy.IkParameterization.Type.Transform6D
success = kinematics.load_ikfast(robot, iktype)
if not success:
rospy.logerr('Failed to load IKFast for {0}, manipulator: {1}'.format(robot.GetName(), manipulator.GetName()))
IPython.embed()
exit(1)
# Load links stats for finding closest IK solutions
statsmodel = orpy.databases.linkstatistics.LinkStatisticsModel(robot)
if not statsmodel.load():
rospy.loginfo('Generating LinkStatistics database. It will take around 1 minute...')
statsmodel.autogenerate()
statsmodel.setRobotWeights()
statsmodel.setRobotResolutions(xyzdelta=0.01)
joint_controller = JointPositionController()
gripper_controller = GripperController()
ft_sensor = FTsensor()
cube = env.GetKinBody('cube02')
cube_centroid = cube.ComputeAABB().pos()
Tgrasp = tr.euler_matrix(0, np.pi, 0)
Tgrasp[:3,3] = cube_centroid
qgrasp = kinematics.find_closest_iksolution(robot, Tgrasp, iktype)
axes = []
axes.append( orpy.misc.DrawAxes(env, Tgrasp, dist=0.05) )
traj = planning.plan_to_joint_configuration(robot, qgrasp)
robot.WaitForController(0)
traj_spec = traj.GetConfigurationSpecification()
traj_duration = traj.GetDuration()
step_num = traj_duration // T
#Here we do not use trajectory controller instead we use joint position controller
#It means that we sample many points on the trajectory, which is given by IK fast solver
#Robot will be moving point by point and follow the specified trajectory
for t in np.append(np.arange(0,traj_duration, T),traj_duration):
joint_controller.set_joint_positions(list(traj_spec.ExtractJointValues(traj.Sample(t),robot, manipulator.GetArmIndices())))
robot.SetDOFValues(list(joint_controller.get_joint_positions()), manipulator.GetArmIndices())
rate.sleep()
gripper_controller.command(0.05)
taskmanip.CloseFingers()
gripper_controller.wait()
robot.WaitForController(0)
robot.Grab(cube)
gripper_controller.grab('{0}::link'.format(cube.GetName()))
Tretreat = np.array(Tgrasp)
Tretreat[2,3] += 0.05
Tretreat[0,3] -= 0.1
axes.append( orpy.misc.DrawAxes(env, Tretreat, dist=0.05) )
qretreat = kinematics.find_closest_iksolution(robot, Tretreat, iktype)
traj = planning.plan_to_joint_configuration(robot, qretreat)
robot.WaitForController(0)
traj_spec = traj.GetConfigurationSpecification()
traj_duration = traj.GetDuration()
step_num = traj_duration // T
for t in np.append(np.arange(0,traj_duration,T),traj_duration):
joint_controller.set_joint_positions(list(traj_spec.ExtractJointValues(traj.Sample(t), robot, manipulator.GetArmIndices())))
robot.SetDOFValues(list(joint_controller.get_joint_positions()),manipulator.GetArmIndices())
rate.sleep()
time.sleep(2)
Now, move the box down to the table surface until contact
python
dt = 1. / js_rate
Kf = 5000.
Kp = np.array([1., 1., 1.]) * 1.
Kv = np.array([1., 1., 1.]) * 40
Fr = np.array([0., 0., -15])
qc = joint_controller.get_joint_positions()
Fe_prev = np.zeros(3)
xf = np.zeros(3)
dxf = np.zeros(3)
rospy.loginfo('Going down')
wrench_offset = ft_sensor.get_filtered_wrench()
link_idx = [l.GetName() for l in robot.GetLinks()].index('robotiq_85_base_link')
link_origin = robot.GetLink('robotiq_85_base_link').GetTransform()[:3,3]
J = np.zeros((6,6))
twist = np.zeros(6)
while not rospy.is_shutdown():
q_actual = joint_controller.get_joint_positions()
robot.SetDOFValues(q_actual, manipulator.GetArmIndices())
We = ft_sensor.get_filtered_wrench() - wrench_offset
bTe = manipulator.GetEndEffectorTransform()
bXeF = criros.spalg.force_frame_transform(bTe)
Wb = np.dot(bXeF, We)
Fb = -Wb[:3]
Fr[0:2] = Fb[0:2]
if np.linalg.norm(Fb) >= np.linalg.norm(Fr):
rospy.loginfo('Surface contacted, preparing for sliding')
break
# Force PD compensator
Fe = (Fr - Fb) / Kf
dFe = (Fe - Fe_prev)
Fe_prev = Fe
dxf = (Kp*Fe + Kv*dFe) * dt
xf += dxf
twist[:3] = dxf
# Velocity-based operational space controller
J[:3,:] = robot.ComputeJacobianTranslation(link_idx, link_origin)[:,:6]
J[3:,:] = robot.ComputeJacobianAxisAngle(link_idx)[:,:6]
dqc = np.linalg.solve(J, twist)
qc += dqc
joint_controller.set_joint_positions(qc)
rate.sleep()
# Safety limits: displacement and max force
if np.linalg.norm(Fb) >= 40.:
rospy.loginfo('Maximum force exceeded')
break
time.sleep(2)
Slide on the surface using hybrid control
python
vlin = 0.006 #linear velocity
dr_slide = [1.,0.] # sliding direction on x-y plane
dt = 1./ js_rate # time step
x0,y0,z0 = manipulator.GetEndEffectorTransform()[:3,3] #position of gripper at the starting point
xr = [x0,y0,z0]
timeout = 20
Kp_pos = np.array([1, 1, 0]) #proportional gain of position controller
Kv_pos = np.array([0.05, 0.05, 0]) #derivative gain of position controller
Kp_force = np.array([0, 0, 3.4e-5]) #proportional gain of force controller
Kv_force = np.array([0, 0, 5e-6]) #derivative gain of force controller
bTe = manipulator.GetEndEffectorTransform()
bXeF = criros.spalg.force_frame_transform(bTe) # transformation matrix that convert wrench wrt body frame to wrench in space frame
wrench_offset = ft_sensor.get_filtered_wrench()
We = ft_sensor.get_filtered_wrench() - wrench_offset
Wb = np.dot(bXeF, We) #wrench (the environment inserts on the end effector) is represented in space frame
Fe_prev = -Wb[:3] #extract force vector only, negative sign indicates this is the force inserted on the environment by the robot
xe_prev = [x0, y0, z0]
qc = joint_controller.get_joint_positions()
force_data = list() #data for graph
time_data = list()
initime = rospy.get_time()
link_idx = [l.GetName() for l in robot.GetLinks()].index('robotiq_85_base_link')
link_origin = robot.GetLink('robotiq_85_base_link').GetTransform()[:3,3]
J = np.zeros((6,6))
twist = np.zeros(6)
rospy.loginfo('Sliding')
while not rospy.is_shutdown() and (rospy.get_time() - initime) < timeout:
xr[0] += dr_slide[0] * vlin * dt
xr[1] += dr_slide[1] * vlin * dt
q_actual = joint_controller.get_joint_positions()
robot.SetDOFValues(q_actual, manipulator.GetArmIndices())
# Transform wrench to the base_link frame
We = ft_sensor.get_filtered_wrench() - wrench_offset
bTe = manipulator.GetEndEffectorTransform()
bXeF = criros.spalg.force_frame_transform(bTe)
Wb = np.dot(bXeF, We)
Fb = -Wb[:3]
Fr = np.array([0., 0., -15])
Fr[:2] = Fb[:2]
Fe = Fr - Fb
dFe = (Fe - Fe_prev) / dt
Fe_prev = Fe
dxf_force = (Kp_force*Fe + Kv_force*dFe) * dt
xb = manipulator.GetEndEffectorTransform()[:3, 3]
xe = xr - xb
dxe = (xe - xe_prev)
xe_prev = xe
dxf_pos = (Kp_pos*xe + Kv_pos*dxe) * dt
dxf = dxf_force + dxf_pos
twist[:3] = dxf
# velocity-space IK
J[:3,:] = robot.ComputeJacobianTranslation(link_idx, link_origin)[:,:6]
J[3:,:] = robot.ComputeJacobianAxisAngle(link_idx)[:,:6]
dqc = np.linalg.solve(J, twist)
qc += dqc
force_data.append(Fb[2])
time_data.append(rospy.get_time() - initime)
joint_controller.set_joint_positions(qc)
rate.sleep()
rospy.loginfo("Complete hybrid control demo")
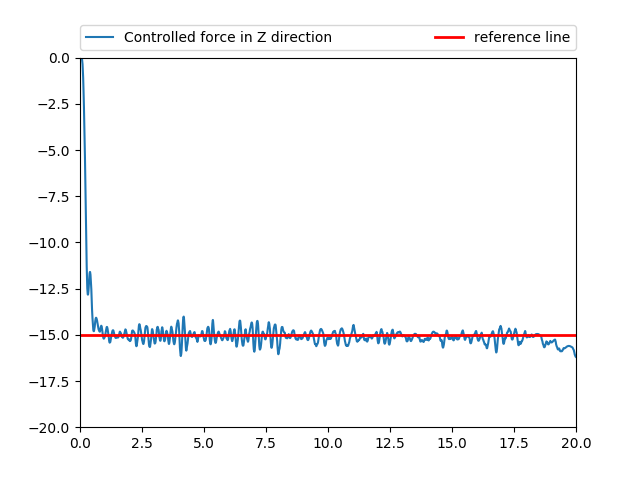
Plot the force data
python
import matplotlib.pyplot as plt
plt.ion()
plt.plot(time_data,force_data, label = "Force measured in the Z direction")
plt.axhline(y=-15.0, xmin=0, xmax=15., linewidth=2, color = 'r',label = "Reference")
plt.axis([0,20,-20,0])
plt.legend(bbox_to_anchor=(0., 1.02, 1., .102), loc=3,
ncol=2, mode="expand", borderaxespad=0.)
plt.show()